

- Главная страница
- Продукты
- Сервоприводы
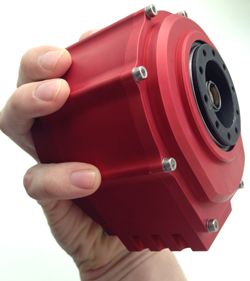
- Малая масса сервоприводов. Малая масса важна для снижения переносимой массы робота, снижения энергопотребления, а также для уменьшения кинетической энергии манипуляторов типа "рука", которые могут наносить травмы ударами при движении.
- Сервоприводы являются интеллектуальными и управляются по шине CAN или ШИМ, с отправкой обратно информации о текущем состоянии привода.
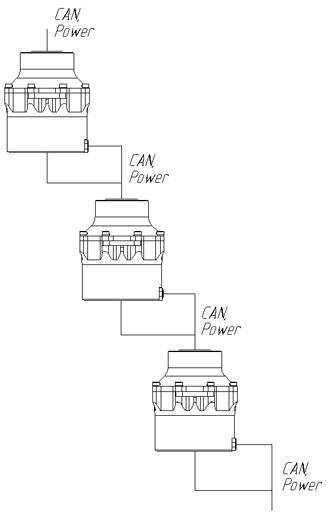
- Приводы имеют полые валы для пропуска кабелей или разъемы для сквозной проводки кабелей питания и кабелей информационных шин внутри руки. Скрытые внутри руки кабели хорошо защищены от повреждения при работе.
- Приводы герметичны, пыле- и водостойкие (класс IP68), работают при расширенном диапазоне температур вне помещений
- Через полые валы приводов можно проводить кабели, не относящиеся непосредственно к питанию или управлению сервоприводами. Например, если на конце манипулятора типа "рука" установлен дополнительный модуль целевой нагрузки, то через цепочку сервоприводов в руке можно протянуть кабели, необходимые этому модулю.

Компоновка сервоприводов оптимизирована для применения в робототехнических комплексах различного назначения.
Наличие полого вала обеспечивает возможность проводки любых кабелей через ось двигателя или сквозная проводка через центральный разъём, проводку кабелей шины питания и управления CAN через вращающийся вал и надежную защиту кабелей от механических повреждений.
Малый вес при большом крутящем моменте: конструкция оптимизирована для мобильных роботов.
Стандартный CANbus интерфейс и встроенный блок управления на основе микроконтроллера обеспечивают простое сопряжение с бортовыми компьютерами мобильных роботов.
Сервоприводы спроектированы для работы в широком диапазоне температур в полевых условиях, вне помещений, под дождем, в грязи, в снегу. Единый пыле- и водонепроницаемый разъем для шины питания и управления обеспечивает возможность работы в широком диапазоне внешних условий.
Возможность соединения до 15 приводов в цепочку. Интегрированный блок питания обеспечивает возможность перекомпоновки роботов в полевых условиях.

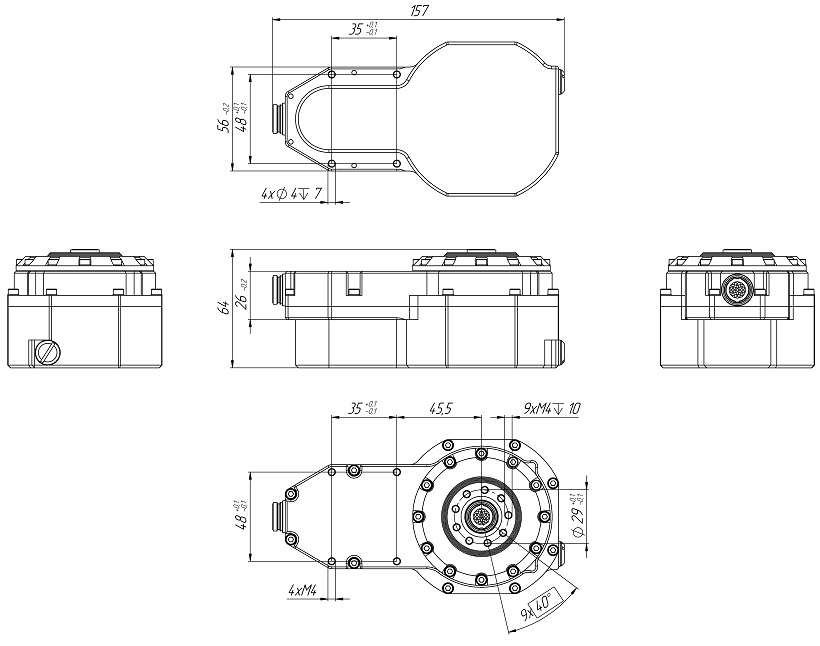
Сервопривод 35Нм 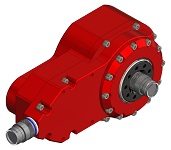 |
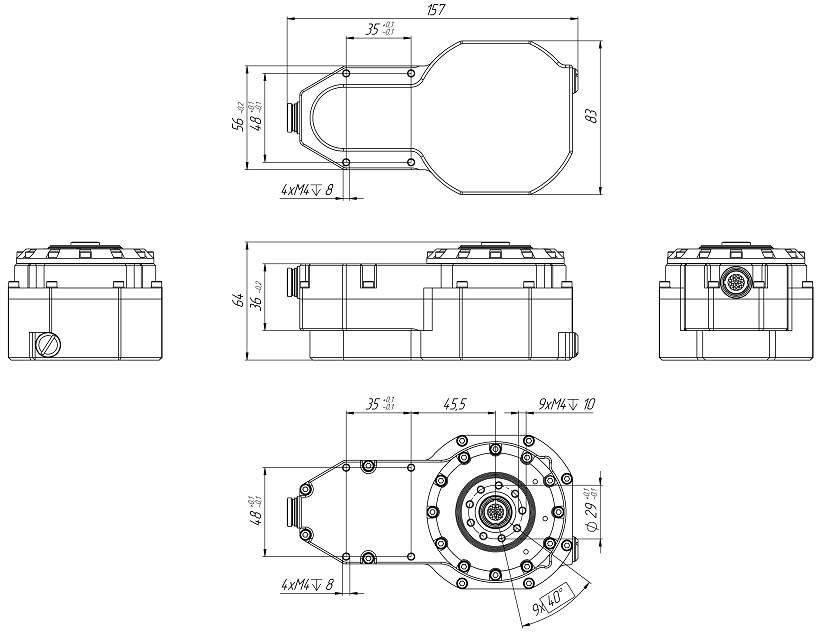
Сервопривод 56Нм 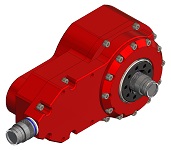 |
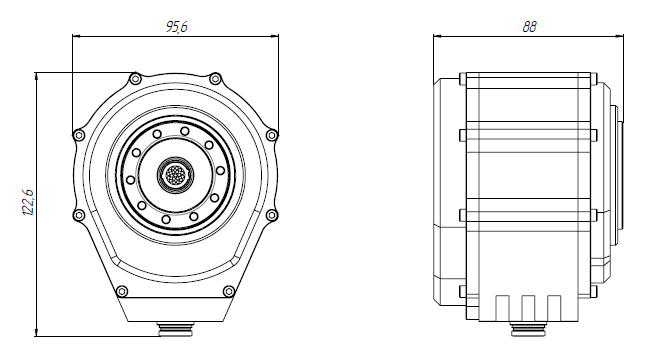
Сервопривод 64Нм  |
|
| Крутящий момент, Нм | 35.0 | 56.0 | 64.0 |
| Масса, кг | 1.0 | 1.0 | 1.25 |
| Габаритные размеры, мм |
 |
 |
 |
| CAD модель (файл *.STEP) |
скачать | скачать | |
| Сквозная проводка | Через сквозные разъёмы | Через сквозные разъёмы | Через сквозные разъёмы |
| Время поворота вала на 90°, сек | 4.2 | 6.0 | 9.0 |
| Угловая точность, градусы | ± 0.2 (более высокая точность - по запросу) | ± 0.2 (более высокая точность - по запросу) | ± 0.2 (более высокая точность - по запросу) |
| Входное напряжение, VDC | 18-36 | 18-36 | 18-36 |
| Номинальное напряжение, VDC | 24 | 24 | 24 |
| Средняя потребляемая мощность, Вт | 32 | 32 | 32 |
| Макс.количество приводов, соединенных в цепочку, шт | 15 | 15 | 15 |
| Интерфейс управления | CAN (RS232 или ШИМ опционально) | ||
| Степень защиты по классификации IP | IP68 (пыленепроницаемость, водонепроницаемость) | ||
| Рабочая температура, °С | -20…+65 | ||